- >>兩相步進電機
- >>無刷電機
- >>三相步進電機
- >>行星減速機
- >>直流無刷電機
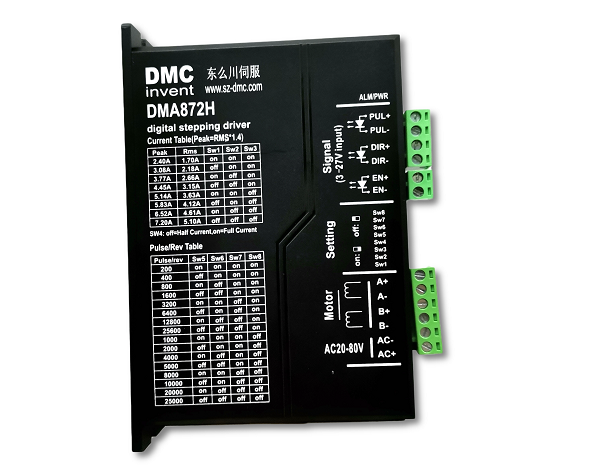
- >>兩相步進驅(qū)動器
- >>直流無刷驅(qū)動器
- >>三相步進驅(qū)動器
- >>直流無刷伺服驅(qū)動器
- >>韓國GGM電機減速機

深圳市東么川伺服控制技術(shù)有限公司
電話:13316379101
郵箱:1355229533@qq.com
地址:深圳市龍華區(qū)民治街道樟坑社區(qū)青創(chuàng)城A棟B502
步進電機的介紹、分類及應(yīng)用中的問題探討
發(fā)布時間:2021-09-16 06:03:12
01概述:
步進電機是一種數(shù)字控制電動機,其接受控制脈沖信號并相應(yīng)的轉(zhuǎn)動一定的角度。實際運用中步進電機與控制器是不可分割的整體,通過單片機、DSP 等微控制器產(chǎn)生的控制脈沖信號是弱電信號,需要經(jīng)過驅(qū)動電路功率放大后才可以作用在電機的繞組上,使繞組按一定順序通電。只要各相繞組按既定的順序輪流通電,步進電機就能產(chǎn)生所需的步進運動。
因為其開環(huán)控制具有較高的分辨率,步進電機作為經(jīng)濟型數(shù)控機床的核心,在數(shù)控機械中得到了廣泛的應(yīng)用。經(jīng)過長期的發(fā)展,步進電機在數(shù)字控制的許多領(lǐng)域都得到了相關(guān)的應(yīng)用,其作為控制用電機或驅(qū)動用電機在辦公自動化設(shè)備、計算機外設(shè)和工業(yè)機械等領(lǐng)域有較多的應(yīng)用實例。近年來,微電子技術(shù)、大功率電力電子器件及驅(qū)動技術(shù)的迅速發(fā)展,進一步促進了步進電機的發(fā)展。
02步進電機分類:
步進電機一般可分為以下三類:
1、反應(yīng)式步進電機。反應(yīng)式步進電機定子由硅鋼片疊成,相對的兩個磁極纏有纏繞方向不同的同一繞組,通電時形成一對 N、S 極,電機轉(zhuǎn)子中沒有繞組。電機轉(zhuǎn)子是由軟磁材料制成的,轉(zhuǎn)子磁極外表面和定子磁極內(nèi)表面有許多個大小相同、間距相同的小齒。電磁力是反應(yīng)式步進電機產(chǎn)生運動的動力,在電磁力的作用下,轉(zhuǎn)子會運動到最大磁導(dǎo)率(或者最小磁阻)的位置,并處于平衡狀態(tài)。
2、永磁式步進電機。永磁式步進電機轉(zhuǎn)子的材料是永磁性的,轉(zhuǎn)子與定子的極數(shù)相同,電機輸出轉(zhuǎn)矩大,步距角相對較大,但工作性能良好。
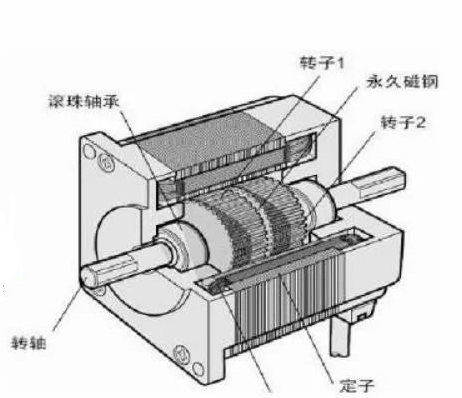
3、混合式步進電機。混合式步進電機定子的結(jié)構(gòu)與反應(yīng)式步進電機相同,轉(zhuǎn)子在軸向分為兩段,兩段鐵芯外圍圓周方向都均勻分布著相同數(shù)量、尺寸的小齒,但相互錯位半個齒距。兩段鐵芯中間嵌入永磁鐵,使得轉(zhuǎn)子一端鐵芯呈 N 極,另一端鐵芯呈 S 極,如圖 1.1 所示。轉(zhuǎn)子的 N、S 極性不變,通過控制定子繞組電流實現(xiàn)定子磁極的 N、S 極性的順序變化,對轉(zhuǎn)子的 N、S 極產(chǎn)生相應(yīng)的作用力,推動轉(zhuǎn)子按要求旋轉(zhuǎn)。因為混合式步進電機轉(zhuǎn)子的永磁磁場也產(chǎn)生一部分的轉(zhuǎn)矩,所以比反應(yīng)式步進電機僅由定子磁場產(chǎn)生的轉(zhuǎn)矩要大。
步進電機有如下的特點:
(1)步距角穩(wěn)定,只與電機結(jié)構(gòu)等有關(guān),不受電壓、電流、溫度等各種干擾因素影響;
(2)步進電機的轉(zhuǎn)動角度與控制脈沖的數(shù)目成正比,沒有累積誤差;
(3)步進電機動態(tài)性能好,啟停、正反轉(zhuǎn)及變速都能在少數(shù)控制脈沖內(nèi)完成;
(4)步進電機開環(huán)控制系統(tǒng)簡單可靠,加上檢測反饋環(huán)節(jié),可構(gòu)成高性能的閉環(huán)控制系統(tǒng);
(5)步進電機在中低速時具有較大轉(zhuǎn)矩,能夠比相同級別的伺服電機提供更大的扭矩輸出;
(6)步進電機體積小,在狹窄的空間內(nèi)仍可順利安裝,并提供較高轉(zhuǎn)矩輸出;
步進電動機的主要缺點是效率低;不能直接使用交流或直流電源,需要適當(dāng)?shù)尿?qū)動電源才能運行;帶負載慣量的能力不強;在應(yīng)用中可能出現(xiàn)低頻振蕩和失步的現(xiàn)象。
03步進電機應(yīng)用中的問題:
步進電機一般運用在精度和穩(wěn)定性要求不高的開環(huán)系統(tǒng)中,可能存在失步并且無法準(zhǔn)確及時的對失步進行檢測補償?shù)膯栴},導(dǎo)致系統(tǒng)的精度降低。步進電機閉環(huán)控制能從根本上解決失步的問題,提高步進電機的工作性能,不僅可以實現(xiàn)步進電機更加精確的位置和穩(wěn)定的轉(zhuǎn)速控制,還可以使步進電機獲得更大的通用性。電力電子器件和微處理器的發(fā)展為步進電機閉環(huán)控制性能的提高提供了基礎(chǔ),步進電機的閉環(huán)控制正逐漸向數(shù)字化、智能化、模塊化方向發(fā)展。
在實現(xiàn)步進電機簡單有效的閉環(huán)控制中,如何獲取電機轉(zhuǎn)子位置和速度反饋信號是相當(dāng)重要的一個環(huán)節(jié)。傳統(tǒng)的步進電機閉環(huán)控制多采用光電編碼器或者旋轉(zhuǎn)變壓器等機械傳感器檢測步進電機轉(zhuǎn)子的速度、位置,并將反饋信號與輸入脈沖相比較,從而對失步進行補償。運用機械位置傳感器實現(xiàn)步進電機的失步補償,會增加步進系統(tǒng)的復(fù)雜性,大大的削弱步進電機的競爭力,限制了它的應(yīng)用場合,而且增加了電機與控制系統(tǒng)之間的連接線路和接口電路,使系統(tǒng)易受環(huán)境干擾,降低了系統(tǒng)的可靠性。為了解決機械傳感器帶來的各種缺陷,需要研究步進電機無位置傳感器控制。
步進電機無位置傳感器控制的相關(guān)文獻較少,而且?guī)缀醵际潜C苄再|(zhì)的,但無位置傳感器控制在無刷直流電機、永磁同步電機等電機中的應(yīng)用有較多的研究,相關(guān)文獻較多。混合式步進電機與永磁凸極同步電動機在作用機理上相似,雖有不同之處,但從本質(zhì)上,混合式步進電機可以說是一種低速凸極永磁同步電機,混合式步進電機控制可以參考永磁同步電動機的控制策略來研究和設(shè)計。無位置傳感器控制在永磁同步電機中的應(yīng)用對步進電機無位置傳感器控制的研究有一定的借鑒意義。
本篇文章就給大家介紹這么多,后面更多關(guān)于步進電機的知識,希望大家持續(xù)關(guān)注,謝謝大家!
產(chǎn)品推薦:兩相步進電機



產(chǎn)品推薦:無刷電機







產(chǎn)品推薦:兩相步進驅(qū)動器






產(chǎn)品推薦:直流無刷驅(qū)動器






 地址 ADDRESS
地址 ADDRESS